围绕未来的自动驾驶产业链诞生的创业公司每天都在增加。最近,两位从特斯拉Autopilot项目组离职的工程师公开了他们的创业公司lvl 5,这是一家致力于采用“众包”思路绘制高精度地图的公司,希望依靠人民群众的力量达到自动驾驶地图要求的实时更新和高精度要求。
lvl 5官网简明的介绍了他们所做的工作:「高精度地图和定位技术」。“我们研发计算机视觉软件来提供自动驾驶汽车要求的高精度地图”。

lvl 5三位创始人中Eric Reed和Andrew Kouri此前曾在特斯拉Autopilot项目组工作,而George Tall是来自iRobot的计算机视觉工程师。

Eric Reed,Andrew Kouri和George Tall
在介绍lvl 5具体的实现路径前,我们先来说说自动驾驶技术对地图的要求。由于高精度地图是直接给自动驾驶汽车“看”的,所以要求精度要达到厘米级、对突发的路况做到实时更新(例如倒下的树、车祸导致道路堵塞)、细节丰富(传统车载导航中没有的车道线、交通标志、通行方向等都要体现)。以上三点要求对高精度地图的绘制提出了很大挑战,以高德的高精度地图为例,成本超800万的地图采集车大大限制了高精度地图的采集绘制,更勿论实时更新。
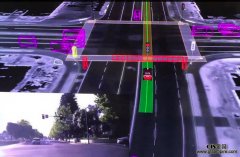
lvl 5的方案是,抛弃传统图商以激光雷达为核心传感器采集高精度地图的做法,转向以消费级摄像头为主,由摄像头拍摄大量路况信息视频,将这些视频通过计算机视觉软件绘制成高精度地图,完成对地图的实时更新。
又是那个旷日持久的争议,激光雷达是不是不可取代?目前看来,ADAS霸主Mobileye以及今天的lvl 5的高精度地图绘制完全依靠摄像头;而博世和特斯拉又加上了对毫米波雷达的支持;更主流的方案是激光雷达+毫米波雷达+摄像头多传感器融合的解决方案。

对于这个问题,lvl 5的回应是:“我们真的不在乎是激光雷达效果好还是计算机视觉方案更胜一筹。但我们都知道的是,如果想要自动驾驶汽车商业化,摄像头已经准备就绪,而激光雷达还不行。”
通过软件技术投入取代了昂贵的传感器,但这还不够。如何做到实时更新?
lvl 5面向Uber和Lyft司机推出了一个名为Payver的APP,将手机固定在汽车仪表盘前方,下载Payver并启动APP,APP就会自动开始收集大量视频、加速度计和GPS数据,然后手机会将收集来的大量数据压缩上传至云端lvl 5的服务器上,再由lvl 5的计算机视觉算法将这些“素材”转译为高精度地图。作为回报,这些司机每提交一英里的路况信息可以得到0.01~0.05美元。
“众包”思路效果拔群,截至目前,Payver的下载量仅2500次左右,然而lvl 5的高精度地图已经在3个月内覆盖了美国90%的高速公路。Kouri对他们的策略非常自豪:“每个人都忽视了一点:自动驾驶汽车永远不会商业化,除非我们能提供实时更新的高精度地图。没有人去系统的做这个事情,这正是我们致力去做的。”
前半句很对,但是,“没有人去系统的做这个的事情”?明明特斯拉的方案就跟lvl 5非常像啊。
需要强调一点,lvl 5今年3月从Y Combinator加速器孵化,开始独立运营。当时lvl 5的只需要消费级摄像头的打法比图商TomTom、Here和Mobileye成本更低。也是当时全球唯一一家采用摄像头数据+计算机视觉方案绘制高精度地图的公司。Kouri接受采访时表示:“甚至特斯拉都没有做这样的工作。”
但是就在上个月中旬,特斯拉也开始启用Autopilot 2.0硬件车型上的摄像头收集路况信息,特斯拉在路测数据共享政策中写道:
“我们正在努力提高自动驾驶主动安全功能,并尽快使自动驾驶技术落地。
为此,我们需要通过布局在车身外部的摄像头来收集路况短视频,以便获取车道线、路牌及交通灯的位置等路况信息。特斯拉对路况的覆盖越广,每一辆特斯拉汽车的自动驾驶能力就越高。”
根据官方的表述,特斯拉视觉处理工具Tesla Vision 基于深度神经网络,能够对行车环境进行专业的解构分析,相比传统视觉处理技术可靠性更高。
lvl 5跟特斯拉的方案有什么区别?
答案很可能是没什么区别,因为Kouri把lvl 5的优势指向了规模:“如果特斯拉能解决这个问题,那当然很棒。问题是全球特斯拉汽车保有量只有25万辆左右。如果lvl 5能与3~4家车企达成合作,我们就可以避免很多事故的发生。”
据悉,lvl 5已经跟一家不具名的主流车企展开试点合作,最终的目标是与多家主流车企达成合作。每个车企都需要为安装lvl 5数据收集系统和高精度地图支付部分费用,同时还需为lvl 5实时更新维护地图支付订阅费用。
除了特斯拉和lvl 5,Mobileye旗下的REM地图服务也是众包思路,希望通过搭载Mobileye摄像头的汽车完成REM地图的绘制,截至目前,包括日产、大众、宝马等多家车企已经与之达成了合作。此外,博世旗下的BRS地图服务也是众包思路,“面向全行业所有的供应商和车厂开放”。
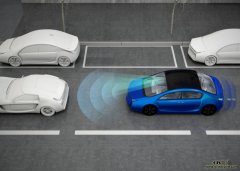
对自动驾驶汽车来说,高精度地图有两个作用,一是延伸传感器的感知范围,为高速行驶的自动驾驶汽车定位、感知和决策提供路况信息支持;二是冗余保障,在传感器短暂失效的风险假设下,通过定位和高精度地图保证自动驾驶汽车继续前进。
前有博世作为Tier 1霸主和Mobileye作为ADAS霸主的行业号召力,后有特斯拉一入场就坐拥25万辆“地图采集车”,留给lvl 5的时间不多了。
转载请注明出处。GIS帝国网站报道中出现的商标及图像版权属于其合法持有人,只供传递信息之用,非商务用途。
 相关文章
相关文章
 精彩导读
精彩导读




 热门资讯
热门资讯 关注我们
关注我们