一句话阐述一下观点:
为了追求性价比,目前很多L3系统设计有且仅有视觉识别车道线进行横向相对定位,一旦识别误判,会导致车辆剧烈调整转向,严重可导致失控。一种直接的解决办法是引入为L4中核心的高精地图和定位方法,降低定位抖动的风险。
本文以高速公路匝道口的场景为例,复盘翻车事故,分析事故可能的原因,介绍高精地图和定位的现状,讲解该技术如何能够解决匝道口这种高速上常见然而又非常挑战L3系统的场景。值得一提的是,本文得到自动驾驶产业分析和报告专家Jane的指点,把握了很多细节。
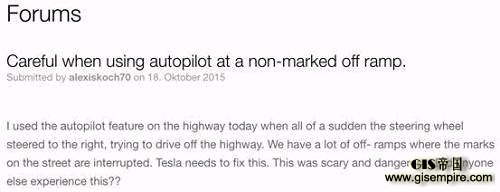
一起“莫名其妙”的事故
 |
 |
 |
 |
致命的匝道口
其实大部分L3搞不定缺乏车道线(non-marked)信息的匝道口,由于信息的不透明,广大读者也都不清楚,当然系统的辅助目的也不是为了搞定这个。Tesla作为新锐企业,用户非常有品牌认可度,因此有大量的用户会乐于尝试AutoPilot,如果缺乏引导(用户往往不会有耐心阅读手册和提醒的),或者恰当的系统设计,是会导致AutoPilot滥用和误用的情况出现。
 |
 |
 |
 |
|
|
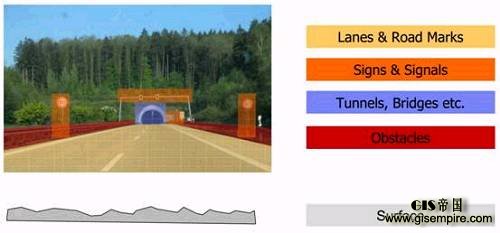
解决这两个问题,L4早有经验,那就是高精地图和定位技术,两者缺一不可,共同确定车辆当前所在的车道,哪怕是车道线混淆和缺失的情况,还可以预知前方道路的曲率。
高精地图与定位
地图的重要性是毋庸置疑的,自从人类发明地图开始,从地理信息中挖掘出价值和知识的地理信息系统(Geographic Information System,GIS),已给科学和社会的进步带来了毋庸置疑的巨大贡献。从早期的纸质地图,到颠覆性创造之后的电子地图,从结构化和半结构化的单机地图,到地图数据库和地图数据仓库。伴随着计算机科学的飞速进步,地理信息系统也得到了充分的支持和长足的发展。目前,地理信息系统在人类的驾驶活动中以导航应用的形式存在,提供通向目的地的优选路径及导航信息。伴随汽车智能化的提升,导航应用为人们的生活带来了极大的方便。然而,传统导航应用由于商品化程度较深、地图格式各不相同和较粗的地图精度等原因,难以为自动驾驶系统所用。对智能驾驶和安全驾驶的迫切需求,业界推动了高精地图(High Precision Map,HPM)的研发。
坦率来讲我并不知道高精地图于定位的所有技术细节,但在使用过程中我非常能够体会到它的重要性,之前还写过几段相关的技术调研,一并贴上来。现有L3对该技术利用较少,致其误报率较高,进而用户体验较差,最终影响L3的普及使用和安全性。想像一下,如果L3对前方道路的曲率、上下坡道的坡度都能够有细致到车道级别(定位误差0.2米)的了解,使用前方道路的路网、曲率和坡度等信息,结合车辆运行状态,能够有效改进系统效果。从这种使用信息的方式来看,地图可谓是与相机、雷达、GPS等设备并列的智能传感器之一,而且比起其他传感器,地图有许多优点,如不受光照、雾霾和雷雨等天气影响,不受昼夜影响,更不受传感器安装位置及车型影响。
 |
我了解的HPM格式有两种,分别是ADASIS和OpenDrive,介绍如下:
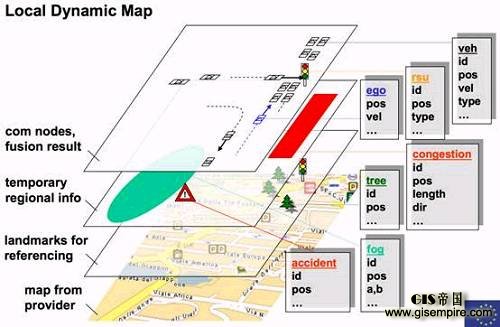
ADASIS,是ADAS Interface Specification的缩写,旨在为ADAS提供HMP信息。具体来讲,ADASIS通过称为ADAS地图信息片(Horizon)的形式提供车辆周围的HPM信息,为ADAS服务。为了便于ADAS调用,信息通过车载CAN总线给出。跟路口预警相关的信息是STUB信息,用于表示路口的道路信息,包括该路口位于整个路线中的位置、车道转角、车道数目、交规赋予的路权等。ADASIS的研发通过一个自组织社区的形式进行,成员包括ADAS提供商Continental Automotive、Bosch、dSPACE、IPG,地图和数据提供商Autonavi、Naavinfo、TomTom、HERE,车辆生产商BMW、Daimler、Ford、Honda、Toyota、Volkswagen等。
OpenDrive,是一个开放的路网逻辑标准,由VIRES公司于2005年发布第一版本,初衷是建立统一的路网逻辑,便于不同驾驶模拟器之间进行数据交换。后来由于智能及安全驾驶技术的需求,也被ADAS作为HPM的格式之一所用,可提供与ADASIS类似的信息。具体来讲,OpenDrive以XML格式提供车道级地图信息,并提供各编程语言的解析接口,方便开发者快速整合到自有环境。提供OpenDrive的研发也是通过自组织社区的形式,由VIRES公司主导。成员包括驾驶模拟器公司DLR、Fraunhofer、TMI Dynamatics、TrianGraphics,车辆生产商BMW、Daimler,智能交通研究机构VTI和TUM等。
在HPM的帮助下,自动驾驶系统的可用性和用户粘性增加了许多。如BMW公司利用HPM开发了驾驶速度推荐(Adaptive Speed Recommendation,ASR)模块。ASR在HPM提供道路曲率、路口、环岛和限速标志的情况下,实时为驾驶员推荐适合当前驾驶情况的车速。ASR减少了急刹急起的不良驾驶状态,有效改善了驾驶的舒适性。Craig提到几种ADAS利用HPM改进驾驶安全性的应用,包括根据道路的类型和几何特点动态调整灯光的自适应前灯,根据道路曲率、坡度计算驾驶员可视道路(Line-Of-Sight,LOS)来辅助偏僻道路超车,以及根据道路曲率、坡度辅助过弯的弯道速度预警。
在更高级的智能驾驶应用中,目前HPM主要用于改进车辆定位的精度。民用GPS定位的平面误差在10米左右,利用实时动态(Real Time Kinematic,RTK)GPS和连续运行卫星定位服务系统(Continuous Operational Reference System,CORS)改进的平面定位误差虽然可达厘米级,但由于RTK基站的覆盖范围有限,CORS基站搭建的成本较高等原因,难以在高速公路普及推广。Schindler利用HPM中的地标,构建原型拟合(prototype fitting)优化问题,改进蒙特卡洛定位模型的精度。Nedevschi利用HPM提供的道路拓扑、几何和地理信息,使用贝叶斯网络概率模型提高车道位置的识别精度,进而提高车辆的定位精度。在路口危险预警方面,目前HPM的应用较少,Lefevre在使用民用GPS的情况下,在贝叶斯网络模型中加入HPM提供的路网信息,该方法较好过滤了驾驶过程中的不确定性,改进了以往单独利用轨迹簇或车辆状态预测驾驶意图的效果。
谈到技术水平,目前高精地图也是有很多家在做,都声称自己有很高的经度。所以存在一个怎么选择的问题,我的看法是看它配套的定位技术如何。
技术现状
 |
TomTom展示车道级高精度定位技术
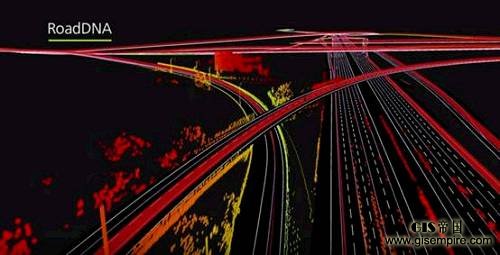 |
HERE
 |
Mobileye
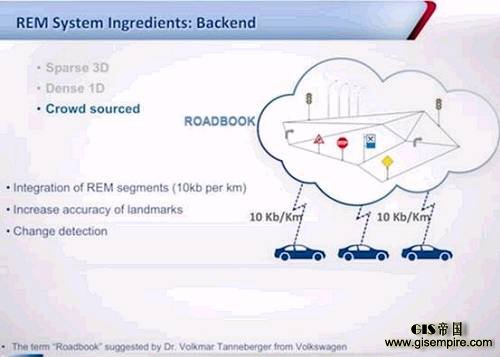
应该是配装过程中饱受匝道口之苦,Mobileye也在年初提出了自己的高精度地图技术(称作REM,Road Experience Management),未使用复杂的3D激光雷达来采集和制作地图,CTO Shashua认为并不需要,而是通过图像中丰富的纹理和色彩特征来生成地图。Mobileye采取的策略是三维上稀疏,地面一维稠密的结构,三维元素不会包括原始图像数据,而是经过识别后的语义信息。
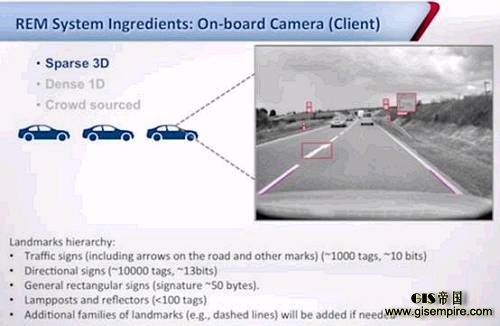 |
地面一维的信息则包括的比较多,建立了一个道路模型,包括车道线的精确位置、连接关系等。
 |
 |
高精地图与定位解决匝道口隐患
其实解决这个问题很好办,只需要知道车辆在地图中的位置即可,下面介绍两个公开的方法,成本考虑都是基于视觉的。
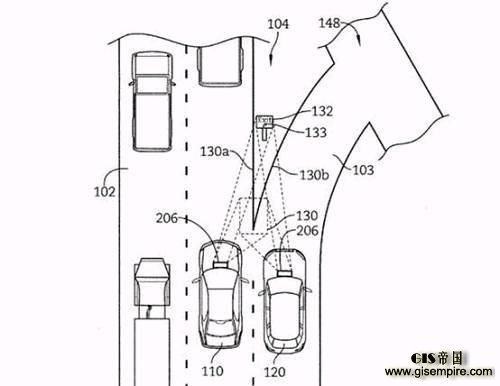 |
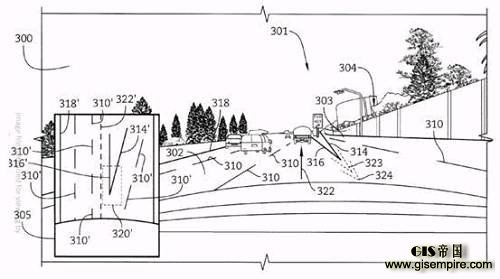 |
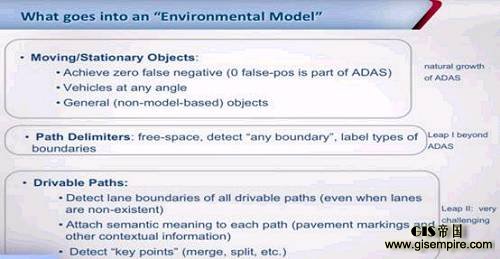
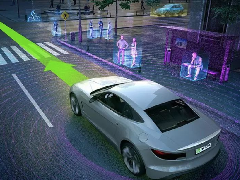
另一个就是利用Mobileye新版本中的环境模型(Environmental Model),包括运动和静止的物体、车道线、可行驶区域和交通标志等。
 |
 |
重申一下我不是想黑Tesla,我极其佩服Tesla作为自动驾驶技术的先驱和推广者,为行业扛下的锅。本文仅从技术层面,非常主观地推测和判断高精地图和定位技术的好处,求轻拍。
转载请注明出处。GIS帝国网站报道中出现的商标及图像版权属于其合法持有人,只供传递信息之用,非商务用途。
 相关文章
相关文章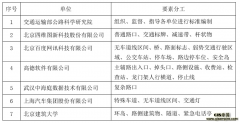


 精彩导读
精彩导读




 热门资讯
热门资讯 关注我们
关注我们