据Lux Research报告,到2030年,激光雷达将在自动驾驶领域收获近亿美元的商业机会。并且按照车企从ADAS向全自动驾驶过渡的商用化计划,激光雷达已经开始在车辆局部发挥特长。
用于自动驾驶的传感器中,专业人士对激光雷达的评价是“必不可少”。从最早的谷歌豆荚车到层出不穷的车企测试案例,激光雷达已经逐渐发展为标配。不难发现,随着企业自动驾驶方案的选择和规划,车用激光雷达的商业化正悄然发生。
但不同激光雷达企业进入自动驾驶领域的策略各不相同,产品技术也存在差异。激光雷达与自动驾驶作为最佳CP如何走到一起?作为激光雷达的领军企业,Velodyne,Ibeo和Quanergy打开市场有何不同姿势?

“传感器+高精度地图+云计算”目前被业内认定为“最靠谱的自动驾驶方案”。
传感器是自动驾驶汽车的眼睛,用来观察行驶时环境的动态变化。高精度地图为汽车提供全局视野,尤其擅长预告检测范围外的道路情况。云计算保证传感器数据更新上传,让高精度地图始终处于最新版本并下发车辆。
要 让自动驾驶系统代替人类驾驶员,头等大事就是在任何时间、任何地点“看清”周围环境。行车环境复杂,汽车没法单靠一种传感器胜任全部工作。本着“谁行谁 上”的原则,摄像头、激光雷达、毫米波雷达发挥各自优势,分工完成了全套感知,保证在不同时间气候下,360度范围内检测车道、交通、行人、标志、刹车灯 和路障等各类实时信息。
在这其中,激光雷达最擅长的部分是障碍探测与障碍追踪。
与雷达原理相似,激光雷达使用的技术是飞行时间(TOF,Time of Flight)。简而言之,就是根据激光遇到障碍后的折返时间,计算目标与自己的相对距离。不过据业内人士介绍,激光光束与声波相比更加聚拢,因此可以准确测量视场中物体轮廓边沿与设备间的相对距离,这些轮廓信息组成所谓的点云并绘制出3D环境地图,精度可达到厘米级别。
Ibeo中国销售总监北京欧百拓信息科技发展有限公司CEO剧学铭打了个比方,用激光雷达看世界,效果好比近视戴上了合适的眼镜。
这种精度对上路行驶的全自动驾驶汽车而言,可以更加接近100%安全。Velodyne亚洲区总监翁炜举了一个简单案例,毫米波雷达可以发现路边障碍,但只能“看到”模糊形体。而厘米级精度可以清楚区分出障碍是道牙还是斜坡,自动驾驶汽车断定是斜坡后,就可以做出安全开上车道的决策。
当然激光雷达并非万能。剧学铭认为,对于环境颜色信息的区分,激光雷达不够直接、快捷,而这方面正是摄像头的强项。毫米波雷达可以快速获得速度信息,并且在雾天衰减率低,穿透性好,这点与激光雷达相比,是其优势。遇到传感器束手无策的天气,就需要借助高精度地图。翁炜列举了谷歌自动驾驶豆荚车的案例,暴雪覆盖路面的时候,豆荚车就在高精度地图基础上,定位计算马路车道线位置,确定行驶轨迹。
行业标杆:Velodyne 64线激光雷达
如果再深入了解激光雷达如何描绘周围图景,线数、点密度、水平垂直视角、检测距离、扫描频率、精度是几个主要的参数。
自 动驾驶和激光雷达这对CP组合,就是从Velodyne 64线开始进入大众视线的。2012年5月,谷歌改装版丰田普锐斯自动驾驶汽车在内华达州上路测试,出场时头顶转个不停的Velodyne 64线,很快就成了自动驾驶汽车的标志性特征。与此同时,谷歌对外宣布项目研究目标——实现无人驾驶并且量产。
当 时曝光的谷歌专利显示,车顶64线激光雷达的作用是绘制周围环境的动态3D高精度地图。 通过360度的机械旋转,确保全面检测车辆周围的环境图景。该设备在量产车中被保留,最终版原型车在考虑风阻和防护之后进行了重新设计。但实际上这款 Velodyne64线是为地图行业而生,所得数据对自动驾驶汽车实时检测而言,存在冗余。
我们不妨寻找一个案例进行说明。恰巧Velodyne员工曾经公布了一段64线产品的拆解视频,可以帮助理解。
不 同激光雷达的构造存在差别,不过大致由发射系统、接收系统、信息处理等部分组成。拆解后的Velodyne64线如下图所示。从正面看,整个激光收发器可 以视为上下两部分,每部分都有三个并排透镜,两侧透镜是激光发射处,中间是接收处。转到产品背后会发现,两侧凸镜后各有16个一组的二极管,中间透镜对应 32个接收器,可以把光信号变成电信号。
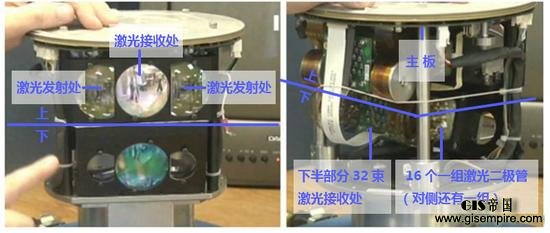
激 光光束从两侧透镜发出,遇到障碍物折返后经过中间透镜被抓取,接收器处理分析后判断障碍物位置。所有的时间信息、控制信息、接收信号都会传到顶端的主板上 进行信息处理。底部的旋转记录器会记下旋转时所在位置和旋转信息。所有原始数据可以通过底部数据线传送至电脑。为了让机器旋转时保持平衡,这款64线激光 雷达加装了一个沉重的底座。
工作时这款产品垂直方向有64条光束放射状射出(线数),可以覆盖垂直方向26°的角度(垂直视角),抵达 100-120米的远方(检测距离),探测障碍所在位置的误差大约10cm左右(精度)。通电后底座马达会驱动激光雷达每秒旋转10次(频率),从而覆盖 水平360°的视域(水平视角),每圈输出13万个信息点(点密度),形成所谓的“点云”。
两种激光雷达车用方案
1、以地图为中心:
不断进入自动驾驶领域的玩家中,同样使用“大花盆”的还有不少互联网企业,例如百度,Uber。主要原因是包括谷歌、百度、Uber在内的全自动驾驶汽车未来还会承担街景车角色,利用车顶激光雷达绘制高精度地图。Velodyne亚洲市场负责人翁炜表示,类似Uber这样的用车公司发现,车顶激光雷达可以将自动驾驶汽车和传统车辆区别开来,反而可以突显身份实现自我营销。

图3为Uber无人驾驶测试车,图4为百度无人驾驶测试车
2、以汽车为中心:
但是对大多数车企而言,他们更想要一款专为汽车量身定制的激光雷达产品。
首先,和测绘专用的笨重“大花盆”相比,小型激光雷达和汽车更配。在车企观念中,为了兼顾驾驶乐趣和风阻系数,自动驾驶汽车和普通汽车在外观上不该有任何差别。激光雷达最好能被做成小体积直接嵌入车身,这就意味着要将机械旋转部件做到最小甚至抛弃。

,Velodyne新产品Solid-State Hybrid Ultra Puck™ Auto,Quanergy旗下产品S3
因此车用激光雷达没有选用大体积旋转结构,而是在制作工艺上,将旋转部件做到了产品内部。例如Ibeo的激光雷达产品LUX,改为固定激光光源,通过内部玻璃片旋转的方式改变激光光束方向,实现多角度检测的需要。福特订购的Velodyne新产品Solid-State Hybrid Ultra Puck™ Auto,是款长相类似冰球的半固态激光雷达,也将旋转部件做到内部隐藏起来。比较特别的是,Quanergy旗下产品S3是一款全固态产品,使用了相位矩阵这种新技术,内部不存在任何旋转部件。
其次,嵌入式安装方式导致的监测范围遮挡,可以用多点布局的方式覆盖整车360°视角。在车用激光雷达领域,Ibeo是最早开始嵌入式安装方案的企业。在一辆全自动驾驶测试车上,Ibeo为其配备了四个LUX,两个位于车头两个位于车尾,两个mini LUX安装在车侧。

随 着自动驾驶汽车的普及和智能交通的全面覆盖,激光雷达的数量会越来越少。翁炜表示,未来路上实现自动驾驶的车辆越来越多,车尾的激光雷达可以逐渐取消,所 需检测可由后方车辆前脸激光雷达代劳。一些欧美城市开始陆续在十字路口布置激光雷达,车身布置的激光雷达数量也相应减少。并且当“智能网联”逐渐变为寻 常,各处汇入的信息也会减少激光雷达的负担。
最后,在保证上述功能的前提下,成本也是无法忽略的因素。Velodyne64线激光雷达目前售价7万5千美元,但这款产品本身定位试验级别而且用于地图行业,把它与车用激光雷达比价并不恰当。从真正为汽车量身定制的产品来看,一批低价车用激光雷达正在准备进入市场。
今年CES期间Velodyne与福特揭晓了最新产品Solid-State Hybrid Ultra Puck™ Auto, 公布2020年计划量产价为500美金,到2025年计划把成本控制在200美金以内,而始终保持神秘的Quanergy在今年CES展出了一款固态激光 雷达S3约为一盒名片大小,而且单个售价初步定在250刀左右,其展台工作人员表示上量生产后有可能100刀搞定。未来几年里,小型专用激光雷达将会在汽车行业争夺市场。
代表企业:Velodyne、Ibeo和Quanergy
Velodyne、 Ibeo和Quanergy恰好都光顾了2016年初的CES展。当时Velodyne在福特展台上,借Fusion混合动力自动驾驶汽车展示的 Velodyne 32线转个不停;法雷奥供人体验的Cruise4U展示车上,与Ibeo合作的Scala隐蔽在车头;Quanergy一直在高调宣传新产品,2016年 参展CES的激光雷达只有信用卡大小,据说不存在任何旋转结构。
虽然各家企业性格迥异,但似乎都在做同一件事:把激光雷达传感器越做越小,越做越便宜。
这件事对汽车行业而言,意义指向未来。当自动驾驶汽车成为风向指南,激光雷达成了绕不过的传感设备,追求驾驶体验的汽车想让自动驾驶从概念向量产进阶,从高速公路安全驶入城市,离不开一款物美价廉、存在感极低的好产品。
Velodyne
Velodyne是一家硅谷公司。在参加了两届DARPA无人驾驶汽车挑战赛后,2007年开始专注研究激光雷达,用一款Velodyne 64线进入360°高性能激光雷达领域。于是就有了2011年谷歌无人驾驶汽车在湾区测试时,吸引人们目光的“大花盆”。

△从左至右分别为Velodyne 16线、32线、64线
Velodyne目前已经量产销售的激光雷达有三款,分别是HDL-64E(64线)、HDL-32E(32线)、VLP-16(16线)。 除了谷歌、百度、Uber等无人驾驶汽车使用64线产品,一些车企在车上使用32线和16线产品测试。例如2016年1月CES上,福特就展示了安装 velodyne HDL-32的混动版蒙迪欧自动驾驶研究车。荷兰NAVYA的两部全自动驾驶ARMA公交穿梭车测试了VLP-16和HDL-32,最后选用了32线。
虽然这三款激光雷达可以满足外部环境感知需要,但严格来说并不是专为汽车而生。Velodyne 64线最早是用于地图及相关行业,32线把激光器接收器减半,主要用于固定翼无人机。随着小型多旋翼无人机的出现,Velodyne配套生产了更小更轻的 16线产品,目前推出了超轻VLP16,重量由原来830克降至530克。
为 了满足车企把激光雷达隐蔽安装到车身的要求,Velodyne带来了一款专为车企设计的小体积激光雷达。32线产品的体积过大,小体积16线产品线数不 足,采集的信息颗粒粗糙,对软件运算端负担太大。因此1月借由福特公布的Solid-State Hybrid Ultra Puck™ Auto,线数增加到32线,但是体积和原16线一致。

这款Velodyne32线新款固态混合超级冰球传感范围为200米,可以满足车企ADAS和全自动驾驶需要。目前供给车企的Pack1.5投放寿命为6-8个月,车企测试后Velodyne会根据反馈重新调整设计。明年初推出改良后的pack2.0进行第二轮测试,在18年初或年中推出pack3.0作为正式商用版本。公司对这款产品2020年目标量产定价为每个500美金 ,2025年将成本控制在200美金以内。
从64线到最新的混合冰球,产品的核心技术相同,据Velodyne亚洲市场负责人翁炜介绍,可以在多束激光打出返回后,在某一时间打开接收器把激光收回,此处是Velodyne的核心专利。因为车企想要自主掌握核心数据,Velodyne并不提供算法产品。Velodyne向车企输出的是激光雷达原始数据。
除了位置和距离信息,一项特殊数据是扫描物体的密度信息。翁炜表示,根据返回密度,后续算法可以由此判断扫描物体的反射率,确定自动驾驶汽车可以判断众多目标中哪块是交通指示牌,由摄像头针对性地分析指示牌内容,从而减少算法成本。
Ibeo
Ibeo 是一家成立于1998年的公司,2000年被传感器制造商Sick AG收购。2000年至2008年研发了激光扫描技术、并且开始了若干自动驾驶项目的尝试。公司和欧洲委员会共同研发了十字路口安全的驾驶辅助产品,在全 球范围售卖。2009年公司脱离Sick AG独立,2010年和法雷奥合作开始量产可用于汽车的产品ScaLa。

目前已有的Ibeo全自动驾驶测试车上,常用的多点布局组合是miniLUX和LUX两款产品。
LUX有4线和8线两款,8线在垂直方向增加了4条激光光束,获得信息较4线产品更加丰富。两款产品可以用在高速公路自动驾驶和城市自动驾驶,功能上可用于ACC应用到行人检测,利用多回声技术适应不同天气的需要,绘制车辆周围360°的环境图景。
miniLUX主要用来检测车侧和车后障碍。用于车辆侧面时,主要可以在转向时用作侧面保护,车道变更时的盲点监测,以及复杂的自动停车。用于车后,可以作为全3D泊车支持和车尾传感器。
剧 学铭表示,因为考虑到量产,要求成本在相对可接受范围,所以一般从各个参数角度讲都会有一定的折衷,旨在提高驾驶安全,并没有过高的安全要求。Ibeo已 经成熟的产品ScaLa B2是与法雷奥合作的一款4线激光雷达,一般用于汽车紧急制动时的核心检测传感器。去年搭载法雷奥Cruise4U系统的半自动驾驶汽车完成了环法路试。 车上就搭载了与Ibeo合作量产的ScaLa,ScaLa被嵌入了这辆大众车的前脸保险杠,用来取代毫米波雷达做AEB(自动刹车系统)中的测距模块。

△法雷奥与Ibeo合作量产的ScaLa
和其他公司相比,Ibeo最早涉足车载激光雷达产品并提供路上物体追踪、识别。与Velodyne不同,Ibeo的产品包括了硬件和软件在内的整套解决方案,硬件产品涉及ADAS到自动驾驶整个进程,软件方面公司提供的激光雷达融合系统可将6个传感器采集的信息实时整合到一个ECU后,实现智能追踪识别。
根据Ibeo中国销售总监北京欧百拓信息科技发展有限公司CEO剧学铭的介绍,Ibeo的软件方案会设计算法端内容,会输出周围车辆、行人、障碍物、路面信息等有效环境信息,而并非原始的点云数据。
Ibeo 提供的自动驾驶案例耳熟能详。2013年10月13日,日产LEAF搭载了6个LUX测试了其搭载的高级驾驶辅助系统。斯坦福大学测试的自动驾驶奥迪TT shelley也在名单之列,计划2020年在日本商业化的自动驾驶出租Robot Taxi,Rinspeed 概念车Buddi,都使用了Ibeo的激光雷达产品。
Quanergy
Quanergy 作为一家激光雷达领域的新晋创业公司,履历其实十分精彩。2014年5月,获得来自三星电子风险投资,特斯拉创始人及清华企业家协会天使基金的种子投资。 2014年12月,完成3000万美金的A轮融资。2015年Quanergy得到了德尔福的战略投资。德尔福收购了Quanergy部分股权,两家公司 的工程师正在努力研发lidar系统。Quanergy负责技术开发,德尔福有可能负责产生。
2014年9月第一款产品M8-1投入使用,已经应用在奔驰,现代等公司的实验车型上面,在路试过程中为软件模块积累经验。当时M8-1的单个标价是1000美金。为了覆盖车身周围的全部区域,用于展示的奔驰车一共安装了3个样品,两个位于车顶,一个位于车头前方。

2016CES Quanergy展台,看到了新产品S3,“一盒名片大小”的形容或许更加贴切。官方公布的信息并不多,8线激光雷达,探测距离10cm- 150m,扫描频率30Hz。据介绍,今年的新产品只需在车辆前后对角线各装一个,就能覆盖360度视域范围。工作人员表示,产品要等两年后量产,售价有 望减至100刀。
如此便宜的价格,Quanergy给出的答案是“相 控阵激光雷达技术”。抛去传统激光雷达昂贵的旋转部件。用电子扫描代替机械部件,采用集成电路上的小镜子扫描各个方向,然后输出车辆周围的3D图像。创始 人Dr.Louay Eldada对具体技术三缄其口,只表示核心技术是自己的博士研究课题。
车 云菌试图通过联系Quanergy工作人员获取更多信息,但未得到回复。因此有关相控阵激光雷达的应用,只能根据技术猜测。据业内人士介绍,相控阵激光雷 达在目前还是个新技术,因为是固态电子元件,理论上可以独立控制每束激光的发射方向,在每微秒变成任何你想要的形状。在自动驾驶汽车上应用时,根据自动驾 驶汽车的不同状态,调整激光的关注方向。
比如行驶时,自动驾驶汽车可能想要更 多激光指向前方和两侧。当停在十字路口,可以让激光集中到车身两侧判断来车。这种激光光束的方向自发改变且在短时间内完成,比如车正顺路行驶并发现了一个 潜在的障碍物,激光雷达就能把尽可能多的光束集中探测障碍物的形状大小,获得更多信息,判断下一步如何采取行动。

△Quanergy在2016年CES上用于展示S3 Demo的红色奔驰
IEEE 的记者争取了静态体验S3 Demo的机会,在安装S3的奔驰车里观察了运行情况。因为保密协议的关系,这家媒体没有透露太多信息,只是给出了一些评价:首先S3的工作方式的确是固 态激光雷达的运作方式,出于一些合理的原因没有达到Quanergy承诺的效果和水平,但是与Quanergy的核心技术无关。其次,Quanergy所 展示S3并不是他们在媒体发布会上宣称的那个版本,这让他们怀疑Quanergy一年前就宣布将在CES上召开媒体发布会这件事,促成了S3的早产,而实 际上这款产品还并没有准备好。
几条趋势:
电子激光雷达还在实验阶段,机械激光雷达作为成熟技术,仍为市场主流。作为Quanergy的合作伙伴,德尔福公司看重激光雷达产品的长远发展。其首席技术官员Jeff Owens将激光雷达电子化视为未来一大趋势,认为“雷达在过去20年中经历了从机械转动向电子扫描或者说是聚束形成技术转变的过程,激光雷达也将走上同样的道路”。
在咨询相关科研人员和业内人士时有不少人指出,电子激光雷达还是一项新技术,从科研转化为一款可用产品,要历经多次测试和市场检验。据悉,Ibeo目前也在研究电子激光雷达技术,但是因为技术尚未转化为成熟产品,因此没有选择对外公开更多消息。
从此次CES上IEEE的的简单体验来看,Quanergy S3产品没有赶上期望进度。有业内人士表示,激光雷达产品从概念到最终量产,要经过3-5年的测试期,根据S3目前的进展,时间紧迫。不过也有乐观观点认 为,虽然离真正使用还有不少时间,但是这款产品依然可以唤起市场对小型车用激光雷达的注意。
因为激光雷达产品专业性强,自动驾驶又堪称一次漫长的行业革命,激光雷达企业进入市场方式存在细分。翁 炜在谈及Velodyne身份时,强调了公司R&D(产品设计开发)的属性。新产品Solid-State Hybrid Ultra Puck™ Auto不会公开外售卖,Velodyne会根据车企具体计划和产品要求进行定制,并在多次测试中根据反馈调整产品。
这 一点与Ibeo扮演的“元器件提供商”角色不同。Ibeo作为tier2提供技术,由法雷奥负责量产供货。供应商角色更加面向大众化量产市场,会根据漫长 的自动驾驶进程,推出阶段性产品。并对各个实验室产品的参数折衷,将成本控制在可接受范围。典型一例就是Ibeo面向ADAS推出的ScaLa。
同时几家企业透露了目前自动驾驶的各家进展。目前在亚洲地区,每个主要市场都在普及ADAS,每个市场已经有厂家就ADAS和Velodyne展开接触。并且在自动驾驶领域,主机厂已经从采购、技术上开始与Velodyne对接,各个市场都有成名的品牌在周详规划成品车推出时间。
近几年自动驾驶概念日渐普及,中国市场开始出现机会,为此Ibeo已经在中国引入一辆测试车开始本土化调整和算法积累。剧学铭表示,传统主机厂之外,一些新兴造车企业也是他们的潜在客户。同时产学研合作升级,一些国内高校在自动驾驶进展上超出意料,不少算法研究超前,Ibeo也将参与其中。
转载请注明出处。GIS帝国网站报道中出现的商标及图像版权属于其合法持有人,只供传递信息之用,非商务用途。
 相关文章
相关文章

 精彩导读
精彩导读

 热门资讯
热门资讯 关注我们
关注我们