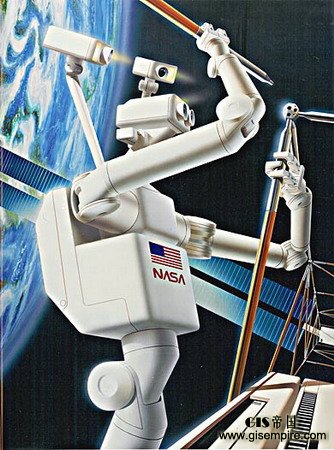
在昨天上午开幕的2015年世界机器人大会上,中国航天科技集团公司空间技术研究院展区的“手眼双目相机”,展现了我国发展空间服务、在轨维护的基础能力。
不同于一般的空间用监控相机仅可以记录操作或动作的过程,“手眼双目相机”类似人的眼睛,可以参与到整个空间操作过程中的,机械臂的远离、接近、抓取和操作目标物体等的每一步动作都要依赖“手眼双目相机”提供的位置数据来完成。另一个显著优点,是“手眼双目相机”无需接触目标物体,对目标物体无干扰、非常适合针对空间漂浮物体操作过程中的测量。据了解,这款“手眼双目相机”可以实现10米以内目标的三维识别与测量,为空间机械臂提供目标物体的准确立体方位,近距离识别精度达毫米级。
为满足机械臂安装需求和活动范围,这款“手眼双目相机”还拥有非常小巧的身材,其探头部分在集成了光学照明和成像功能的情况下仅重不足500克。工作人员介绍,这主要得益于对镜头前端的优化设计和体积小、结构简单的照明方案,据称,经过精简,相机本体结构仅包含了两个零件。
背景资料:
空间操作,航天发展的必经之路
空间操作是指利用具有特殊功能的平台及其所携带的载荷,如灵活机械臂、飞网等,通过对空间目标实施操作或控制,完成某项特定任务的行为。在太空中实施各种空间操作,能极大地增强对目标物体的控制和利用能力,主要任务包括:大型航天器在轨组装、在轨服务与救援、空间失效卫星离轨操作和空间垃圾飞网回收等。其中,空间目标相对测量技术是空间操作的关键技术。双目视觉系统通过对目标近距离的实时成像,完成对目标的三维重构,实现对目标物体的位姿测量。针对高轨空间操作试验,双目视觉系统主要完成与目标星100米之内的相对测量任务,是位姿测量敏感器的有效功能备份。
转载请注明出处。GIS帝国网站报道中出现的商标及图像版权属于其合法持有人,只供传递信息之用,非商务用途。
 相关文章
相关文章 精彩导读
精彩导读




 热门资讯
热门资讯 关注我们
关注我们